|
|
| リジッドボディ > シミュレーション環境 > リジッドボディの作成と削除 > フォース > 衝突 |
| 初期状態の設定 > 質量の中心 > 特殊なコンストレイント > キャッシュについて |
| Rigid Body
Properties > Dynamics Initial State > Force
Controler > Inertial Properties |
| Environment Dynamics
Operator > Simulation Time Control |
| Hinge > Ball
and socket > Slider > Spring > Fixed |
| Ball and Socketコンストレイント(ボールとソケット) |
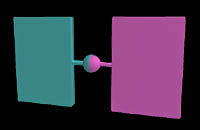 |
連結された複数のリジッドボディを、ピボットポイントを中心に動かす。このコンストレイントは、軸に対する回転の完全な自由度が得られる。チェインの連結やロボットのアームのようなエフェクトの作成に使用できる。
速度を低下させるダンピングと同様に、ボールとソケットの角度スプリングの強度を設定することができる。角度スプリングを停止軸から回転させるほど、戻ろうとする力が大きくなる。
モータをオンにすると、コンストレイントにトルク(フォース)を加えて、コンストレイントを目的の速度で移動させることができる。モータは、拘束関係において2つのリジッドボディオブジェクトが使用されている場合のみ機能する。 |
|
| Ball and Socketのプロパティはどこに? |
| Ball ane Socketコンストレイントオブジェクトを選択してEnterキーを押すことで表示できる。 |
| Ball and Socketのプロパティ / Constraintタブ |
| Active(アクティブ) |
| コンストレイントのオン/オフ。コンストレイントをミュートできる。 |
|
| Visible(可視) |
| ビュー内のコンストレイントオブジェクトの表示のオン/オフ。 |
|
| Attached Bodies Intercolide(アタッチされたボディで相互衝突) |
| このコンストレイントによって一緒に適用される各リジッドボディオブジェクトの衝突状態を、オンまたはオフに切り替える。 |
|
| Spring(バネ) |
| ねじりスプリングの強さを決める定数(フックの法則におけるスプリング係数)。Kpにボール&ソケットとその残りの軸で形成される角度を掛けることにより、各リジッドボディに及ぼすフォースが求められる。単位はN(ニュートン)/メートルに基づく。 |
|
| Damping(ダンピング) |
| 被拘束オブジェクトの速度を減速させる。Kdは減衰係数で、各リジッドボディオブジェクトの相関速度を掛けることにより、減衰力が求められる(減衰力はスプリングとは反対向きに作用する)。単位はN(ニュートン)/メートル/秒。 |
|
| Rest Axis(停止軸) |
| シミュレーションの際にボール&ソケットが到達しようとする軸(その残りの状態)。この軸は、最初に適用されたボディのリファレンスのフレームに対して定義される。 |
| X/Y/Z Component(X/Y/Zコンポーネント) |
|
|
| Ball and Socketのプロパティ / Moterタブ |
| モータはコンストレイントにトルク(フォース)を加えて、コンストレイントを目的の速度で移動させる。モータは、拘束関係において2つのアクティブなリジッドボディオブジェクトが使用されている場合のみ機能する。 |
| Moter Axis(モータ軸) |
| ボール&ソケットがリジッドボディにモータを適用する際の軸。 |
| X/Y/Z Component(X/Y/Zコンポーネント) |
| モータで使用されるX/Y/Z軸の値(-1〜1)。値が0の場合は軸が使用されないことを意味する。 |
|
|